
II. Ensamblaje y Solución (Algoritmo Unificado) 🧩 #
Una vez que tenemos la Matriz de Rigidez Global del Elemento (\(\mathbf{K}_{\text{global}}\)) para cada componente de la estructura (como la barra axial \(4 \times 4\) vista en la Sección I), el siguiente paso es combinarlas para formar la matriz del sistema completo (\(\mathbf{K}\)) y luego resolverlo.
1. Ensamblaje de la Matriz Global (\(\mathbf{K}\)) por Superposición Directa #
El corazón del Método de la Rigidez reside en el proceso de ensamblaje. Este método se basa en los principios de equilibrio nodal y compatibilidad de desplazamientos.
-
Principio: La Matriz de Rigidez Global \(\mathbf{K}\) del sistema completo se obtiene sumando las contribuciones de rigidez de cada matriz \(\mathbf{K}_{\text{global}}\) individual en las posiciones correctas, según cómo los elementos se conectan en los nudos.
-
Grados de Libertad Globales (GDL): Antes de ensamblar, debemos numerar todos los posibles movimientos (desplazamientos \(u_x, u_y\) y rotaciones \(\theta_z\) si aplica) en cada nudo de la estructura. Este conjunto forma los GDL globales del sistema. Si hay \(N_{nudos}\) y cada nudo tiene \(g\) GDL (e.g., \(g=2\) para armaduras 2D), la matriz \(\mathbf{K}\) tendrá dimensiones \((N_{nudos} \times g) \times (N_{nudos} \times g)\). Por ejemplo, la estructura siguiente tiene 3 elementos y 3 nudos. Cada nudo tiene 2 GDL (Movimiento \(u_x, u_y\)), por lo que, la matriz \(\mathbf{K}\) tendrá dimensiones \((3 \times 2) \times (3 \times 2) = (6 \times 6)\).

-
Mapeo y Suma (Superposición):
- Inicializar \(\mathbf{K}\): Crear una matriz global \(\mathbf{K}\) llena de ceros, con tamaño igual al número total de GDL globales.
- Iterar por Elementos: Para cada elemento de la estructura:
- Calcular su \(\mathbf{K}_{\text{global}}\) (\(4 \times 4\) para barra axial 2D).
- Identificar los índices de GDL globales asociados a los nudos de ese elemento. Por ejemplo, si una barra conecta el Nudo 1 (GDL globales 1, 2) y el Nudo 2 (GDL globales 3, 4).
- Sumar: Añadir cada término \((i, j)\) de la \(\mathbf{K}_{\text{global}}\) del elemento al término correspondiente \((I, J)\) de la matriz \(\mathbf{K}\) global, donde \(I\) y \(J\) son los índices globales mapeados desde los índices locales \(i\) y \(j\).
-
Ejemplo Conceptual: El proceso se puede desarrollar de la siguiente manera para la figura mostrada más arriba:
- Inicializar \(\mathbf{K}\): $$ \mathbf{K} = \begin{array}{cc}% & \begin{matrix} u_1\;\; & v_1\;\; & u_2\;\; & v_2\;\; & u_3\;\; & v_3\;\; \end{matrix} \\ \begin{matrix} F_{u_1} \\ F_{v_1} \\ F_{u_2} \\ F_{v_2} \\ F_{u_3} \\ F_{v_3} \end{matrix} & \begin{pmatrix} K_{11} & K_{12} & K_{13} & K_{14} & K_{15} & K_{16}\\ K_{21} & K_{22} & K_{23} & K_{24} & K_{25} & K_{26}\\ K_{31} & K_{32} & K_{33} & K_{34} & K_{35} & K_{36}\\ K_{41} & K_{42} & K_{43} & K_{44} & K_{45} & K_{46}\\ K_{51} & K_{52} & K_{53} & K_{54} & K_{55} & K_{56}\\ K_{61} & K_{62} & K_{63} & K_{64} & K_{65} & K_{66} \end{pmatrix} % \end{array} = \begin{pmatrix} 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0 \end{pmatrix}$$
2.1. Iterar por Elementos (K 1):
$$\mathbf{K^1} = \begin{array}{cc}% & \begin{matrix} u_1\;\; & v_1\;\; & u_2\;\; & v_2\;\; \end{matrix} \\ \begin{matrix} F_{u_1} \\ F_{v_1} \\ F_{u_2} \\ F_{v_2} \end{matrix} & \begin{pmatrix} K_{11}^1 & K_{12}^1 & K_{13}^1 & K_{14}^1\\ K_{21}^1 & K_{22}^1 & K_{23}^1 & K_{24}^1\\ K_{31}^1 & K_{32}^1 & K_{33}^1 & K_{34}^1\\ K_{41}^1 & K_{42}^1 & K_{43}^1 & K_{44}^1\\ \end{pmatrix} % \end{array} \implies$$$$ \mathbf{K}^1_G = \begin{array}{cc}% & \begin{matrix} u_1\;\; & v_1\;\; & u_2\;\; & v_2\;\; & u_3\;\; & v_3\;\; \end{matrix} \\ \begin{matrix} F_{u_1} \\ F_{v_1} \\ F_{u_2} \\ F_{v_2} \\ F_{u_3} \\ F_{v_3} \end{matrix} & \begin{pmatrix} K_{11}^1 & K_{12}^1 & K_{13}^1 & K_{14}^1 & 0 & 0\\ K_{21}^1 & K_{22}^1 & K_{23}^1 & K_{24}^1 & 0 & 0\\ K_{31}^1 & K_{32}^1 & K_{33}^1 & K_{34}^1 & 0 & 0\\ K_{41}^1 & K_{42}^1 & K_{43}^1 & K_{44}^1 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0 \end{pmatrix} % \end{array}$$Se le suma \(\mathbf{K}^1_G\) a la matriz \(\mathbf{K}\)
2.2. Iterar por Elementos (K 2):
$$\mathbf{K^2} = \begin{array}{cc}% & \begin{matrix} u_2\;\; & v_2\;\; & u_3\;\; & v_3\;\; \end{matrix} \\ \begin{matrix} F_{u_2} \\ F_{v_2} \\ F_{u_3} \\ F_{v_3} \end{matrix} & \begin{pmatrix} K_{11}^2 & K_{12}^2 & K_{13}^2 & K_{14}^2\\ K_{21}^2 & K_{22}^2 & K_{23}^2 & K_{24}^2\\ K_{31}^2 & K_{32}^2 & K_{33}^2 & K_{34}^2\\ K_{41}^2 & K_{42}^2 & K_{43}^2 & K_{44}^2\\ \end{pmatrix} % \end{array} \implies$$$$ \mathbf{K}^2_G = \begin{array}{cc}% & \begin{matrix} u_1\;\; & v_1\;\; & u_2\;\; & v_2\;\; & u_3\;\; & v_3\;\; \end{matrix} \\ \begin{matrix} F_{u_1} \\ F_{v_1} \\ F_{u_2} \\ F_{v_2} \\ F_{u_3} \\ F_{v_3} \end{matrix} & \begin{pmatrix} 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 &K_{11}^2 & K_{12}^2 & K_{13}^2 & K_{14}^2 \\ 0 & 0 &K_{21}^2 & K_{22}^2 & K_{23}^2 & K_{24}^2 \\ 0 & 0 &K_{31}^2 & K_{32}^2 & K_{33}^2 & K_{34}^2 \\ 0 & 0 &K_{41}^2 & K_{42}^2 & K_{43}^2 & K_{44}^2 \\ \end{pmatrix} % \end{array}$$Se le suma \(\mathbf{K}^2_G\) a la matriz \(\mathbf{K}\)
2.3. Iterar por Elementos (K 3):
$$\mathbf{K^3} = \begin{array}{cc}% & \begin{matrix} u_1\;\; & v_1\;\; & u_3\;\; & v_3\;\; \end{matrix} \\ \begin{matrix} F_{u_1} \\ F_{v_1} \\ F_{u_3} \\ F_{v_3} \end{matrix} & \begin{pmatrix} K_{11}^3 & K_{12}^3 & K_{13}^3 & K_{14}^3\\ K_{21}^3 & K_{22}^3 & K_{23}^3 & K_{24}^3\\ K_{31}^3 & K_{32}^3 & K_{33}^3 & K_{34}^3\\ K_{41}^3 & K_{42}^3 & K_{43}^3 & K_{44}^3\\ \end{pmatrix} % \end{array} \implies$$$$ \mathbf{K}^3_G = \begin{array}{cc}% & \begin{matrix} u_1\;\; & v_1\;\; & u_2\;\; & v_2\;\; & u_3\;\; & v_3\;\; \end{matrix} \\ \begin{matrix} F_{u_1} \\ F_{v_1} \\ F_{u_2} \\ F_{v_2} \\ F_{u_3} \\ F_{v_3} \end{matrix} & \begin{pmatrix} K_{11}^3 & K_{12}^3 & 0 & 0 & K_{13}^3 & K_{14}^3 \\ K_{21}^3 & K_{22}^3 & 0 & 0 & K_{23}^3 & K_{24}^3 \\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ K_{31}^3 & K_{32}^3 & 0 & 0 & K_{33}^3 & K_{34}^3 \\ K_{41}^3 & K_{42}^3 & 0 & 0 & K_{43}^3 & K_{44}^3 \\ \end{pmatrix} % \end{array}$$Se le suma \(\mathbf{K}^3_G\) a la matriz \(\mathbf{K}\)
2. Aplicación de Condiciones de Borde (Restricciones) 🚫 #
La matriz \(\mathbf{K}\) ensamblada representa la estructura antes de aplicar los soportes (apoyos). Para obtener una solución única y físicamente realista, debemos incorporar las condiciones de borde, que son los GDL con desplazamientos conocidos (generalmente cero en los apoyos).
-
Modelado de Apoyos:
- Apoyo Fijo (Pinned): \(u_x = 0, u_y = 0\).
- Apoyo Móvil (Roller): Restringe el desplazamiento perpendicular a la superficie de rodadura (e.g., \(u_y = 0\)).
- Empotramiento (Fixed): \(u_x = 0, u_y = 0, \theta_z = 0\) (para vigas/marcos).
-
Partición del Sistema: El sistema global \(\mathbf{K} \mathbf{u} = \mathbf{f}\) se puede particionar conceptualmente separando los GDL libres (desplazamientos incógnitos \(\mathbf{u}_L\)) de los GDL restringidos (desplazamientos conocidos \(\mathbf{u}_R\), usualmente \(\mathbf{0}\)).
$$ \begin{pmatrix} \mathbf{K}\cdot{LL} & \mathbf{K}\cdot{LR} \\ \mathbf{K}\cdot{RL} & \mathbf{K}\cdot{RR} \end{pmatrix} \begin{pmatrix} \mathbf{u}_L \\ \mathbf{u}_R \end{pmatrix} = \begin{pmatrix} \mathbf{f}_L \\ \mathbf{f}_R \end{pmatrix} $$Donde:
- \(\mathbf{u}_L\): Desplazamientos incógnitos (libres).
- \(\mathbf{u}_R\): Desplazamientos conocidos (restringidos).
- \(\mathbf{f}_L\): Fuerzas aplicadas en los GDL libres.
- \(\mathbf{f}_R\): Fuerzas de reacción desconocidas en los GDL restringidos.
-
Reducción de la Matriz: Para encontrar los desplazamientos incógnitos (\(\mathbf{u}_L\)), solo necesitamos la primera fila de ecuaciones de la matriz particionada:
$$\mathbf{K}_{LL} \mathbf{u}_L + \mathbf{K}_{LR} \mathbf{u}_R = \mathbf{f}_L$$Como \(\mathbf{u}_R\) es conocido (usualmente \(\mathbf{u}_R = \mathbf{0}\)), el sistema se reduce a:
$$\mathbf{K}_{LL} \mathbf{u}_L = \mathbf{f}_L - \mathbf{K}_{LR} \mathbf{u}_R$$Si \(\mathbf{u}_R = \mathbf{0}\), simplemente resolvemos:
$$\mathbf{K}_{LL} \mathbf{u}_L = \mathbf{f}_L$$Llamamos a \(\mathbf{K}_{LL}\) la Matriz de Rigidez Reducida (\(\mathbf{K}_{\text{red}}\)) y \(\mathbf{f}_L\) el vector de fuerzas reducido (\(\mathbf{f}_{\text{inc}}\)). La eliminación de filas y columnas correspondientes a los GDL restringidos es la implementación práctica de esta reducción.
[Diagrama mostrando matriz K particionada y K_LL extraída]
3. Solución Numérica 💡 #
Una vez obtenido el sistema reducido \(\mathbf{K}_{\text{red}} \mathbf{u}_{\text{inc}} = \mathbf{f}_{\text{inc}}\), este es un sistema de ecuaciones lineales estándar de la forma \(A x = b\).
-
Herramienta de Solución: La forma más eficiente y numéricamente estable de resolver este sistema es utilizando la función
numpy.linalg.solve:import numpy as np # K_red: Matriz de rigidez reducida (Numpy array) # f_inc: Vector de fuerzas reducido (Numpy array) u_inc = np.linalg.solve(K_red, f_inc) -
Evitar la Inversa: Aunque matemáticamente \(\mathbf{u}_{\text{inc}} = \mathbf{K}_{\text{red}}^{-1} \mathbf{f}_{\text{inc}}\), calcular explícitamente la inversa (\(\mathbf{K}_{\text{red}}^{-1}\)) es computacionalmente más costoso y menos estable numéricamente que usar métodos directos como la descomposición LU (implementada en
solve). Por lo tanto,np.linalg.solvees la opción preferida.
4. Ejercicio Demostrativo: Armadura Simple de 2 Barras 💻 #
Analicemos una armadura simple de 2 barras conectadas en un nudo y apoyadas en los otros extremos.
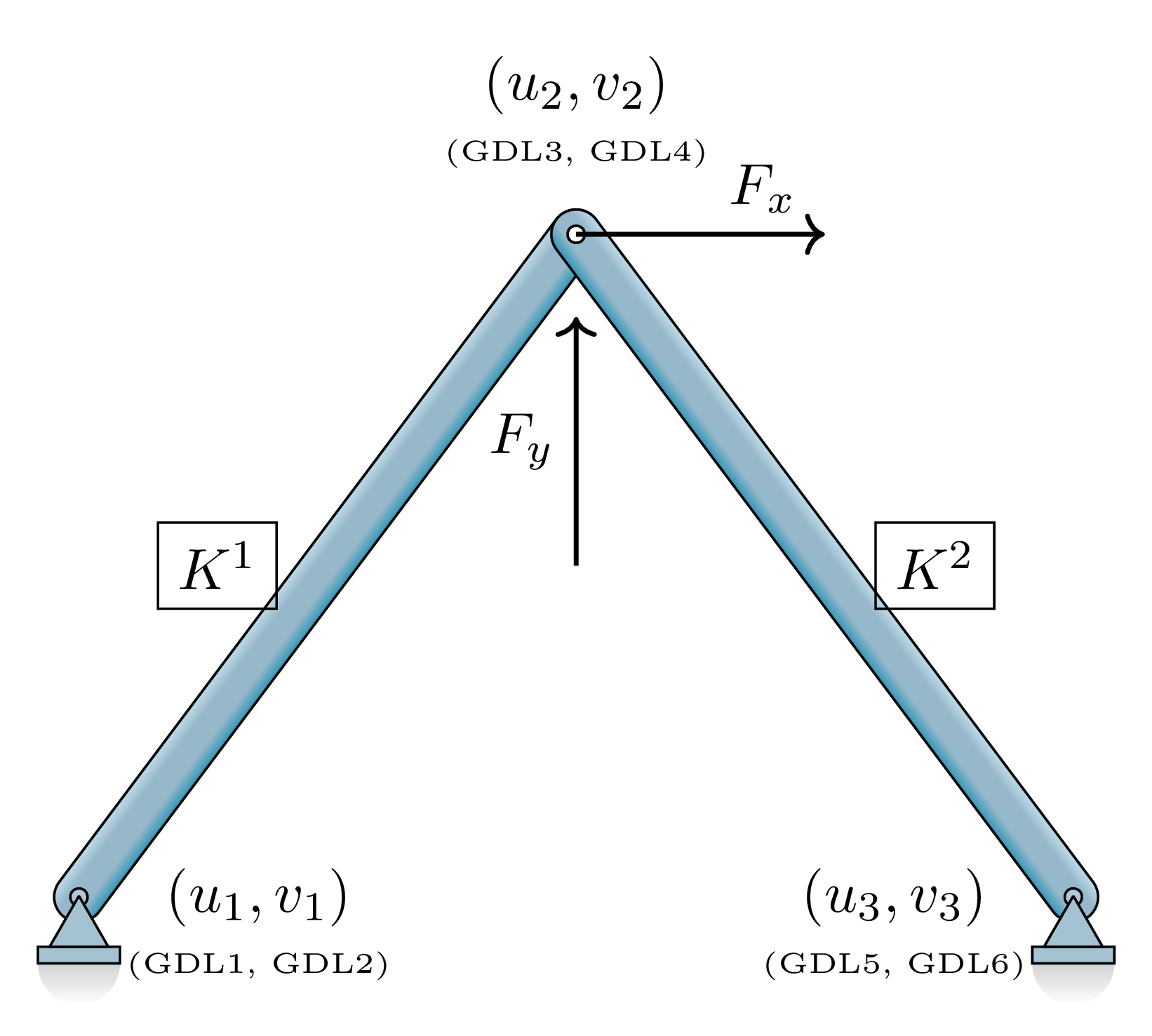
Datos:
- Nudo 1: \((0, 0)\), Apoyo Fijo (\(U_{1x}=0, U_{1y}=0\)). GDL 1, 2.
- Nudo 2: \((L, H)\), Libre. Carga \((F_x, F_y)\). GDL 3, 4.
- Nudo 3: \((2L, 0)\), Apoyo Fijo (\(U_{3x}=0, U_{3y}=0\)). GDL 5, 6.
- Barra 1 (1-2): Longitud \(L_1\), Ángulo \(\theta_1\).
- Barra 2 (3-2): Longitud \(L_2\), Ángulo \(\theta_2\).
- Propiedades: Mismo \(A, E\) para ambas barras.
Pasos:
- Calcular \(\mathbf{K}_{\text{global}}^{(1)}\) para Barra 1 (GDL involucrados: 1, 2, 3, 4).
- Calcular \(\mathbf{K}_{\text{global}}^{(2)}\) para Barra 2 (GDL involucrados: 5, 6, 3, 4).
- Ensamblar \(\mathbf{K}\) global (6x6): Sumar las contribuciones en las posiciones correspondientes. Notar que los GDL 3 y 4 reciben aportes de ambas barras.
- Definir \(\mathbf{f}\) global (6x1): Solo \(f_3=F_x, f_4=F_y\) son no nulos.
- Aplicar Condiciones de Borde: GDL restringidos son 1, 2, 5, 6 (\(\mathbf{u}_R = \mathbf{0}\)). GDL libres son 3, 4 (\(\mathbf{u}_L = [U_{2x}, U_{2y}]^T\)).
- Reducir el sistema: Extraer \(\mathbf{K}_{\text{red}}\) (\(2 \times 2\), correspondiente a GDL 3 y 4) y \(\mathbf{f}_{\text{inc}}\) (\(2 \times 1\), correspondiente a GDL 3 y 4). $$\mathbf{K}_{\text{red}} = \begin{pmatrix} K_{33} & K_{34} \\ K_{43} & K_{44} \end{pmatrix}$$ $$\mathbf{f}_{\text{inc}} = \begin{pmatrix} F_x \\ F_y \end{pmatrix}$$
- Resolver: Calcular \(\mathbf{u}_{\text{inc}} = \mathbf{K}_{\text{red}}^{-1} \mathbf{f}_{\text{inc}}\) usando
np.linalg.solve.
import numpy as np
def calcular_K_global(A, E, L, theta_grados):
# (Función definida en la Sección I para obtener K_global 4x4)
AE_L = (A * E) / L
angulo_rad = np.radians(theta_grados)
c = np.cos(angulo_rad)
s = np.sin(angulo_rad)
c2 = c**2
s2 = s**2
cs = c * s
K_g = AE_L * np.array([
[ c2, cs, -c2, -cs],
[ cs, s2, -cs, -s2],
[-c2, -cs, c2, cs],
[-cs, -s2, cs, s2]
])
return K_g
# --- Datos del Problema ---
L = 4.0 # m
H = 3.0 # m
A = 0.001 # m^2
E = 210e9 # Pa (Acero)
Fx = 5000 # N
Fy = -10000 # N
# Geometría y Propiedades de Elementos
# Barra 1 (Nudo 1 a Nudo 2)
L1 = np.sqrt(L**2 + H**2)
theta1_rad = np.arctan2(H, L)
theta1_deg = np.degrees(theta1_rad)
gdl_1 = [0, 1, 2, 3] # Indices globales para K_global_1 (0-based)
# Barra 2 (Nudo 3 a Nudo 2)
L2 = np.sqrt(L**2 + H**2)
theta2_rad = np.arctan2(H, -L) # Angulo desde Nudo 3 a Nudo 2
theta2_deg = np.degrees(theta2_rad)
gdl_2 = [4, 5, 2, 3] # Indices globales para K_global_2 (0-based)
# --- Ensamblaje ---
num_gdl_total = 6
K_global_ensamblada = np.zeros((num_gdl_total, num_gdl_total))
# Calcular K_global para cada barra
K_global_1 = calcular_K_global(A, E, L1, theta1_deg)
K_global_2 = calcular_K_global(A, E, L2, theta2_deg)
# Ensamblar K_global_1
for i_local, i_global in enumerate(gdl_1):
for j_local, j_global in enumerate(gdl_1):
K_global_ensamblada[i_global, j_global] += K_global_1[i_local, j_local]
# Ensamblar K_global_2
for i_local, i_global in enumerate(gdl_2):
for j_local, j_global in enumerate(gdl_2):
K_global_ensamblada[i_global, j_global] += K_global_2[i_local, j_local]
# --- Definir Vector de Fuerzas Global ---
f_global = np.zeros(num_gdl_total)
f_global[2] = Fx # Fuerza en GDL 3 (U_2x)
f_global[3] = Fy # Fuerza en GDL 4 (U_2y)
# --- Aplicar Condiciones de Borde y Reducir ---
# GDL libres: 2, 3 (U_2x, U_2y)
# GDL restringidos: 0, 1, 4, 5
gdl_libres = [2, 3]
gdl_restringidos = [0, 1, 4, 5]
# Extraer K_red (K_LL)
K_red = K_global_ensamblada[np.ix_(gdl_libres, gdl_libres)]
# Extraer f_inc (f_L)
f_inc = f_global[gdl_libres]
# --- Resolver para Desplazamientos Incógnitos ---
u_inc = np.linalg.solve(K_red, f_inc)
print("--- Resultados del Análisis ---")
print("Matriz de Rigidez Global K (Completa 6x6):")
# print(K_global_ensamblada) # Descomentar para verla completa
print("\nMatriz Reducida K_red (2x2):")
print(K_red)
print("\nVector de Fuerzas Incógnitas f_inc (2x1):")
print(f_inc)
print("\nDesplazamientos Incógnitos u_inc (U_2x, U_2y):")
print(u_inc) # Unidades: metros
7. Ejercicios Propuestos 📝 #
- Concepto: Explica por qué la matriz \(\mathbf{K}\) global es generalmente rala (sparse, con muchos ceros).
- Mapeo: Para una armadura triangular con nudos 1(0,0), 2(L,0), 3(L/2, H), numera los GDL globales (1 a 6) y escribe los vectores de índices globales para cada una de las 3 barras.
- Ensamblaje Manual: Dados \(\mathbf{K}_{\text{global}}^{(1)}\) (\(4 \times 4\) para GDL [0,1,2,3]) y \(\mathbf{K}_{\text{global}}^{(2)}\) (\(4 \times 4\) para GDL [2,3,4,5]), escribe cómo calcularías el término \(K_{33}\) de la matriz global \(\mathbf{K}\) (6x6).
- Vector F: Para la armadura del ejercicio 2, si se aplica una fuerza vertical \(-P\) en el nudo 3 y una fuerza horizontal \(Q\) en el nudo 2, escribe el vector \(\mathbf{f}\) global (6x1).
- Condiciones de Borde: Si el nudo 1 está fijo y el nudo 2 tiene un apoyo de rodillo vertical (restringe \(U_{2y}\)), ¿cuáles son los GDL libres y restringidos para la armadura del ejercicio 2?
- Reducción Manual: Dada una matriz \(\mathbf{K}\) (4x4) y \(\mathbf{f}\) (4x1), si los GDL 0 y 2 están restringidos a cero, escribe la \(\mathbf{K}_{\text{red}}\) (2x2) y \(\mathbf{f}_{\text{inc}}\) (2x1) resultantes.
- Programación: Adapta el código del ejercicio demostrativo para una armadura donde la Barra 2 (3-2) tiene el doble de área (\(2A\)).
- Programación: Adapta el código del ejercicio demostrativo si el Nudo 3 es un apoyo de rodillo vertical (solo \(U_{3y}=0\)). ¿Cuáles serían los
gdl_libresygdl_restringidos? - Concepto: ¿Qué significa físicamente que la matriz \(\mathbf{K}_{\text{red}}\) sea singular (determinante cero)? ¿Qué implicaría para la estructura?
- Interpretación: Si el resultado
u_incdel ejercicio demostrativo es[0.001, -0.002], ¿qué significa esto físicamente para el Nudo 2? - Programación: Modifica el código para calcular \(\mathbf{K}_{\text{global}}\) de la Barra 1 si su ángulo es \(\theta_1 = -30^\circ\).
- Ensamblaje: Considera una barra vertical (Nudo 1 a Nudo 2) y una horizontal (Nudo 2 a Nudo 3). Nudo 1 fijo, Nudo 3 fijo. Nudo 2 libre con carga F. Dibuja el sistema, numera GDL y describe qué términos de \(\mathbf{K}_{\text{global}}^{(1)}\) y \(\mathbf{K}_{\text{global}}^{(2)}\) se sumarían en la \(\mathbf{K}\) global.
- Concepto: ¿Qué parte del proceso (cálculo de K_global, ensamblaje, reducción, solución) cambiaría si el material de una barra fuera diferente (distinto E)?
- Concepto: ¿Qué parte del proceso cambiaría si la carga F se aplicara en medio de una barra en lugar de en un nudo? (Pista: requiere concepto de cargas equivalentes nodales, no cubierto aquí pero importante).
- Programación: Escribe una función Python
ensamblar(K_global_ensamblada, K_elem, gdl_elem)que tome la K global, la K del elemento y su vector de GDL, y realice la suma/superposición. - Concepto: ¿Por qué es importante usar una numeración de GDL consistente en toda la estructura?
- Aplicación: Si el Nudo 2 del ejercicio demostrativo tuviera un asentamiento (desplazamiento impuesto) de \(-0.005\) m en la dirección Y, ¿cómo modificarías el vector \(\mathbf{f}_{\text{inc}}\) usando la ecuación completa \(\mathbf{K}_{LL} \mathbf{u}_L = \mathbf{f}_L - \mathbf{K}_{LR} \mathbf{u}_R\)? (Asume \(u_{2y}\) ahora es conocido y pertenece a \(\mathbf{u}_R\)).
- Concepto: Explica la diferencia entre resolver \(\mathbf{K} \mathbf{u} = \mathbf{f}\) y el análisis de valores propios \(\mathbf{K} \mathbf{\phi} = \lambda \mathbf{M} \mathbf{\phi}\) (análisis modal/vibraciones).
- Programación: Verifica que la matriz
K_global_ensambladaobtenida en el ejercicio demostrativo es simétrica usandonp.allclose(K, K.T). - Desafío: ¿Cómo adaptarías el proceso de ensamblaje si los GDL globales no estuvieran numerados secuencialmente (ej. [1, 2, 5, 6] en lugar de [0, 1, 2, 3])?